

































ไมโครโฟนไร้สาย พบกับบทความที่น่าสนใจกันอีกครั้ง วันนี้เรามาพูดคุยเรื่อง ไมโครโฟนไร้สาย หรือที่เราเรียกกันว่า ไมค์ลอย นั่นแหละ และวันนี้เราจะมาเจาะลึกเรื่องของ ไมค์ลอย ชนิดคลื่น RF และไมค์ลอยชนิด คลื่นดิจิตอล หรือ ไมค์ลอยดิจิตอล นั่นเอง
สืบเนื่องจากในปัจจุบัน การใช้งาน ไมค์ลอย มีแพร่หลายมากขึ้น เนื่องด้วยปัจจัยในเรื่องของความสะดวกสบาย ความเป็นมืออาชีพ ความสวยงาม รวมถึงคุณภาพของเสียงเองก็ตาม ทั้งหมดที่ได้กล่าวมานั้น ล้วนแสดงให้เห็นถึงความนิยมที่เพิ่มมากขึ้นในปัจจุบัน
และเมื่อไม่นานมานี่เอง ไมค์ลอย ที่เริ่มเป็นที่นิยมของตลาดระบบเสียงก็คือ ไมค์ลอย ที่รับ-ส่งสัญญาณในรูปแบบดิจิตอล หลายคนอาจจะเคยคุ้นหูกับคำดังกล่าว เพราะว่าที่ผ่านมาก่อนหน้านี่ระบบการรับ-ส่งสัญญาณไมค์ลอยจะเป็นคลื่น วิทยุความถี่ UHF หรือ VHF และวันนี้เราจะมาดูถึงข้อดี ข้อเสียของไมค์ลอย ทั้ง 2 รูปแบบครับ รวมถึงพูดถึงการทำงานคร่าว ๆ ของไมค์ลอยดังกล่าว
การทำงานของไมโครโฟนไร้สาย
โดยทั่วไปการทำงานของไมค์ลอย ก็คือการส่งสัญญาณเสียงจากตัวไมค์ ไปยังตัวรับสัญญาณ ปัจจุบันคลื่นที่ใช้ส่งสัญญาณก็คือคลื่นวิทยุ ซึ่งคลื่นที่เป็นที่นิยมก็คือ ย่าน UHF หรือ Ultra-High Frequency ( คลื่นความถี่สูงพิเศษ ) ซึ่งมีความถี่อยู่ในช่วง 300 MHz ถึง 3 GHz แต่ถึงกระนั้นว่าด้วยเรื่องกฎหมายในการใช้งานคลื่นความถี่ ไมค์ลอยถึงถูกจัดสรรให้ใช้งานได้เพียงช่วงหนึ่ง ๆ เท่านั้น
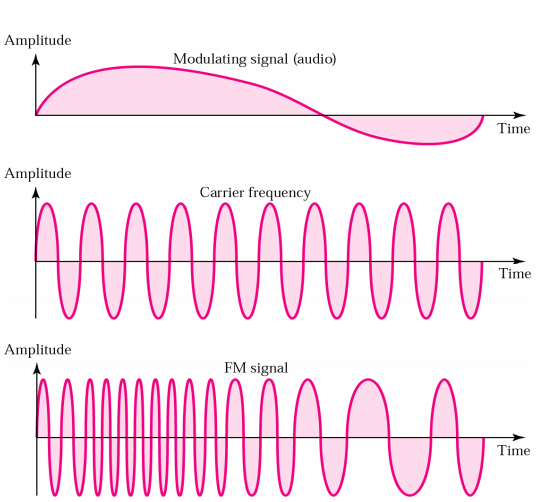
จากรูปเป็นการนำพาคลื่นที่เป็นข้อมูลส่งผ่านคลื่นวิทยุ จะเห็นว่ามีคลื่นที่เป็น ข้อมูล หรือ Audio Signal และจะถูกรวมเข้ากับคลื่นพาห์หรือคลื่นวิทยุและส่งไปในอากาศ จากนั้นตัวรับสัญญาณจะทำหน้าที่ในการถอดข้อมูลเสียงออกมา
การส่งในรูปแบบดิจิตอลก็มีความคล้ายกันครับ เพียงแต่คลื่นพาห์นั้นจะไม่ใช่คลื่นในย่าน UHF แต่จะเป็นคลื่นความถี่สูงกว่านั้นคือ 2.4GHz ซึ่งเป็นคลื่นเดียวกับสัญญาณ WIFI ที่เรา ๆ ใช้งานกันครับ และในกระบวนการส่งสัญญาณกับคลื่นดังกล่าวจะมีการแปลงสัญญาณเสียงจาก Analog ให้เป็น Digital เสียก่อนแล้วจึงส่งสัญญาณเป็นแบบ Digital ไปในอากาศครับ

ส่วนประกอบหลักต่างๆของไมโครโฟน
- ตัวไมโครโฟน (Body Microphone)
- ไดอะแฟรม (Diaphragm)
- ว็อยซ์คอยล์ (Voice Coil)
- ตัวป้องกันฝุ่นและลม (Windshield)
ตลอดระยะเวลาที่ผ่านมาไมโครโฟน(Microphone) ได้มีการพัฒนาและออกแบบหลักการทำงานด้วยเทคโนโลยีต่างๆ ให้เหมาะสมกับการใช้งานประเภทนั้นๆ ออกมาหลากหลายชนิด เช่น
- คริสตอลไมโครโฟน (Crystal Micophone)
- เซอรามิคไมโครโฟน (Ceramic Microphone)
- คาร์บอนไมโครโฟน (Carbon Microphone)
- ริบบอนไมโครโฟน (Ribbon Microphone)
- ไดนามิคส์ไมโครโฟน (Dynamic Microphone) เป็นไมโครโฟนที่นิยมใช้กันอย่างแพร่หลายมากที่สุด มีความทนทานสูง
- คอนเดนเซอร์ไมโครโฟน (Condenser Microphone) เป็นไมโครโฟนที่ต้องใช้กระแสไฟฟ้าถึงจะทำงานได้ การรับสัญญาณมีความไวสูงและตอบสนองย่านความถี่ได้ดี
ทิศทางรัศมีการรับของเสียง (Polar Patterns)
เมื่อเราทราบชนิดของไมโครโฟนแล้ว อันดับต่อไปคือการเลือกรูปแบบทิศทางรัศมีการรับของเสียง (Polar Patterns) ซึ่งมีส่วนสำคัญเป็นอย่างยิ่งเพื่อให้เหมาะสมกับการใช้งานประเภทนั้นๆ ทำให้เสียงที่ได้รับมามีความชัดเจนสมบูรณ์ยิ่งขึ้น เช่น
- Omni-Directional
- Cardioid or Uni-Directional
- Super-Cardioid
- Hyper-Cardioid
- Bi-Directional or Figure-8

ข้อแตกต่างของไมค์ลอยดิจิตอลและไมค์ลอยแอนาลอก ( RF )
1.Dynamic Range
Dynamic Range หรือระดับของการตอบสนองทางสัญญาณเสียง หากเป็นไมค์ลอยแบบเดิม จะถูกจำกัด Dynamic Range ไว้ที่ประมาณ 50 dB แต่เมื่อเป็นไมค์แบบดิจิตอล ข้อจำกัดนี้จึงแทบจะหายไป เพราะสามารถออกแบบให้รับ Dynamic Range ได้ ทำให้ไมค์ที่เป็นคลื่นดิจิตอลมีข้อได้เปรียบตรงนี้ครับ
2. การบีบอัดข้อมูล
ในการส่งสัญญาณนั้น หากข้อมูลมีขนาดใหญ่เกินไปแน่นอนว่าการส่งสัญญาณก็จะลำบากด้วย โดยทั่วไปไมค์ลอยที่เป็นคลื่นวิทยุจะทำการบีบสัญญาณหรือ ลดระดับสัญญาณเพื่อให้มีความเหมาะสมกับการส่งสัญญาณ และตัวรับสัญญาณก็จะทำการขยายสัญญาณข้อมูลกลับมาให้เป็นระดับสัญญาณที่นำไปใช้งานต่อไป ซึ่งกระบวนการนี้เราเรียกว่า Companding และกระบวนการนี้เองก็เป็นอีกหนึ่งขั้นตอนในการทำให้สัญญาณมีการสูญเสียหรือผิดเพี้ยนไปจากเดิม
แต่ในการส่งสัญญาณดิจิตอล จะไม่มีกกระบวนการดังกล่าวจึงทำให้สัญญาณที่ได้มีความเป็นธรรมชาติ
3. การแกว่งของสัญญาณ
ไมค์ลอยทั้ง 2 รูปแบบจะมี Bandwidth ในช่วงที่จะส่งสัญญาณ หรือจะพูดง่าย ๆ ว่าเป็นการแกว่งของสัญญาณ ซึ่งในคลื่น RF จะมีการแกว่างอยู่ราว 0.6 MHz ซึ่งทำให้สูญเสียความกว้างของ Bandwidth ไป เช่นไมค์ลอยที่ใช้ความถี่ 804MHz จะมีการแกว่งของสัญญาณอยู่ในย่าน 803.7 -804.3 MHz ซึ่งหากเป็นการส่งสัญญาณแบบดิจิตอล จะมีการแกว่งที่แคบกว่าแบบ RF ทำให้สามารถใช้งานไมโครโฟนได้มากกว่าแบบ RF
4. การเข้ารหัสสัญญาณ
การเข้ารหัสสัญญาณเป็นกระบวนการในการถอดรหัส เพื่อป้องกันการแทรกสัญญาณ ซึ่งมีอยู่ในไมค์ลอยแบบดิจิตอลเท่านั้น ซึ่งกระบวนการดังกล่าวจะทำการถอดรหัสจากตัวส่งสัญญาณเพื่อให้ตรงกันกับตัวรับสัญญาณเท่านั้น เป็นการป้องกันการดักฟังจากผู้ไม่หวังดี หรือป้องกันการรบกวนซึ่งกันและกัน
5. Digital Output
อีกหนึ่งข้อแตกต่างของไมค์ทั้ง 2 ระบบก็คือ ตัวไมค์ลอยที่เป็นดิจิตอล จะสามารถส่งสัญญาณออกเป็นรูปแบบดิจิตอลได้เลยโดยไม่ต้องผ่านกระบวนการแปลงสัญญาณ ซึ่งจะช่วยลดการสูญเสียและความผิดเพี้ยนของสัญญาณได้ด้วย หรือหากระบบท่านที่เป็น Audio Network อยู่แล้ว ก็สามารถเชื่อมต่อไมค์ลอยเข้าในระบบได้เลยทันที ซึ่งในหัวข้อนี้ไมค์ลอยระบบ RF ยังไม่สามารถทำได้
6. ความหน่วง
ความหน่วง หรือ Latency เป็นเรื่องของระยะเวลาในการประมวลทางสัญญาณ โดยทั่วไปแล้ว Latency ที่ผู้ให้บริการไมโครโฟนยอมรับได้คือต้องไม่มากกว่า 4 ms ซึ่งปัจจุบันไมค์ลอยแบบดิจิตอลยังมี Latency ที่สูงกว่าไมค์ลอยแบบ RF แต่ก็ยังอยู่ในระดับที่กำหนด ผู้ผลิตบางรายออกแบบให้ดิจิตอลไมโครโฟนมี Latency เพียง 2.1ms เท่านั้น
สรุปข้อดี-ข้อเสียของไมค์ลอยทั้ง 2 รูปแบบ
ไมค์ลอยแบบ RF
ข้อดี
- ราคาไม่แพงมาก
- มี Latency ที่ต่ำมาก ๆ
- หาซื้อง่าย
- หากออกแบบวงจรที่ดี จะได้คุณภาพสัญญาณที่เป็นธรรมชาติมากกว่าแบบ Digital
- ส่งสัญญาณได้ไกลกว่าแบบ Digital
ข้อเสีย
- มีโอกาสที่จะเกิดการแทรกกันของคลื่น
- ไม่มีการเข้ารหัส หากมีตัวรับที่คลื่นตรงกัน ก็สามารถที่จะรับฟังจากตัวส่งได้
- ไม่มีช่อง Digital Output
- มีการบีบอัดสัญญาณทำให้เสียงมีความผิดเพี้ยนจากความเป็นจริง
ไมค์ลอยแบบ Digita
ข้อดี
- มี Dynamic Range สูงและไม่มีการบีบอัดข้อมูล
- การเข้ารหัสสัญญาณ ป้องกันข้อมูลที่ไม่พึงประสงค์ที่จะส่งไปยังตัวรับอื่น ๆ
- ตอบสนองความถี่ได้กว้าง
- มี Digital Direct Out ที่ตัวรับสัญญาณ
- ไม่เกิดคลื่นแทรกในระบบ Digital
- สามารถจูนความถี่คลื่นได้มากกว่าระบบ RF
ข้อเสีย
- มีราคาที่ค่อนข้างสูง
- ระยะรับสัญญาณจะใกล้กว่าแบบ RF
- มี Latency สูงกว่าแบบ RF
วันนี้ทางเราขอแนะนำ ไมโครโฟนไร้สาย ที่เป็นที่นิยม และมีผู้เชี่ยวชาญให้คำปรึกษาแนะนำ
สอบถามสินค้าอื่นๆ ติดต่อทาง siamprojector
ติดต่อได้ที่ เบอร์โทร 095-4466266 , 089-8415456 , 02-101-9982